Kraby
Open-source hexapod robot.
Overview
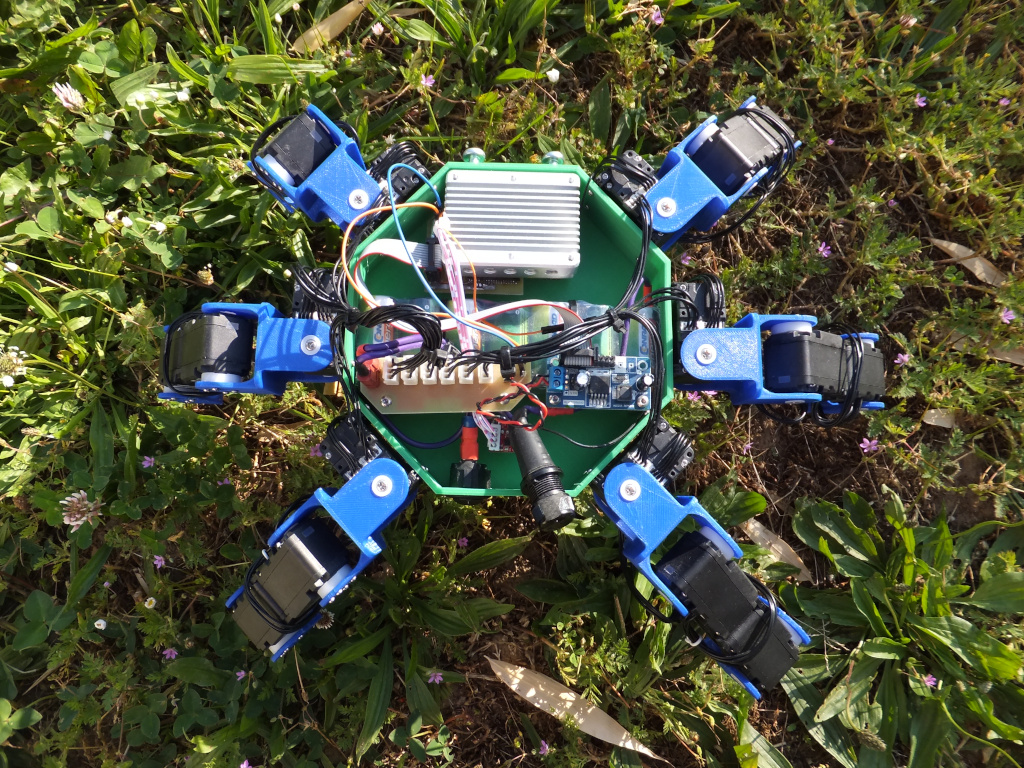
Kraby is an open-source, 3d-printable hexapod robot that is geared towards building a solid development platform for research and educational purpose.
The robot was designed during a Master 1 project at ENS Paris-Saclay, France.
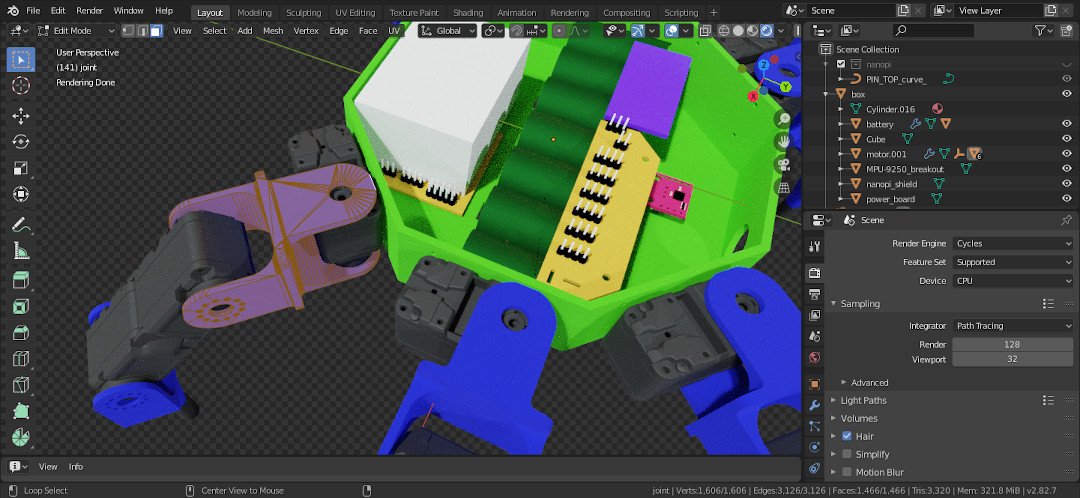
Easy to remix
The robot was designed using Blender, a free and open-source 3D computer graphics editing software. Download and remix Kraby Blender sources.
Smart servo-motors
Kraby uses 18 Herkulex DRS-0101 servomotors from Dongbu to stay cost effective while offering reasonable performances. These includes a DC motor, a gear reducer, a control circuitry and serial communications capability. These servomotors are able to measure motor torque and speed, and are easy to use with a serial port.
Even though the embedded computer has two free serial ports, getting all sensors values of 18 servomotors take an average of 40 ms, see more details there. This means Kraby may be too slow to do proper torque control, that is why we try to use them in position control.
These servomotors are similar to the more popular Dynamixel AX-12.
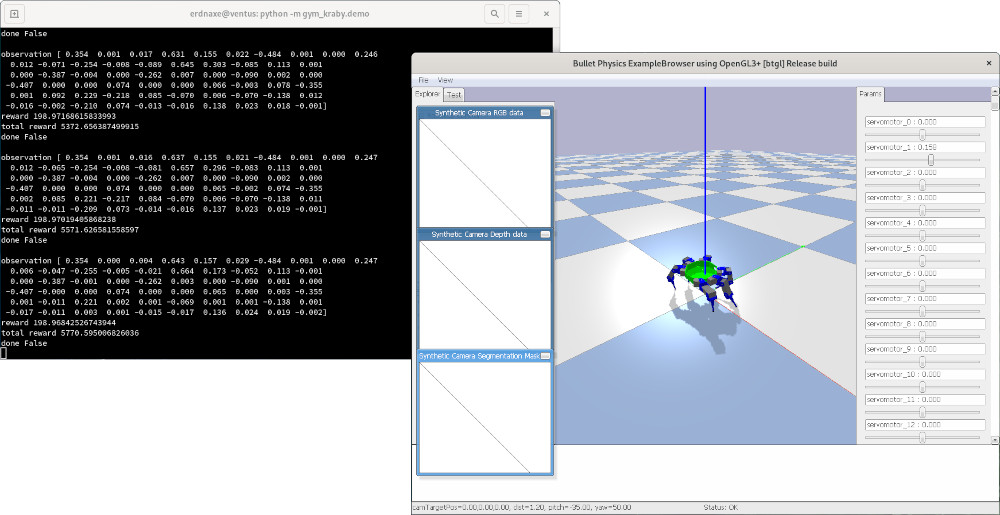
Simulation environment included
OpenAI Gym environments are available and packaged as gym-kraby on PyPi. It uses BulletPhysics simulator with an URDF description of the robot, see more details there.
Build instructions
To build a fully featured robot you will need to build the structure then build the electronics.
Getting help
To get help with Kraby, please join #kraby:auro.re Matrix room or use GitHub issues.