Table of content:
Preparing transfer to real world
Using bigger timesteps
At each time step, we need to gather observation from all servomotors. It cannot be done in parallel as the robot uses only one serial connection. This limits the environment time step to 50 ms.
This speed limit implies that we won’t try torque control on servomotors as this looks too slow.
To train the policy with a time step of 50 ms, we subdivide it by 12 to keep the physic simulation time step around 4 ms.
Compared to previous section, we changed the following training hyperparameters to take into account the new time step:
timestep_limit = 32 # less steps are required
gamma=0.95 # Discount factor, lowered to reduce vibrations
n_steps=128 # batchsize reduced, less steps are required
learning_rate=10e-4 # better performance
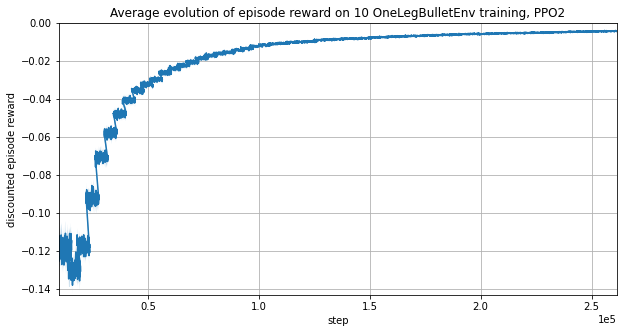
To reduce vibrations, the discount factor was reduced to 0.95.