Table of content:
PCB
PCB were designed using Eagle 9, which demo version is sufficient. PCB design files are available here : https://github.com/erdnaxe/kraby/tree/master/printed_circuit_boards.
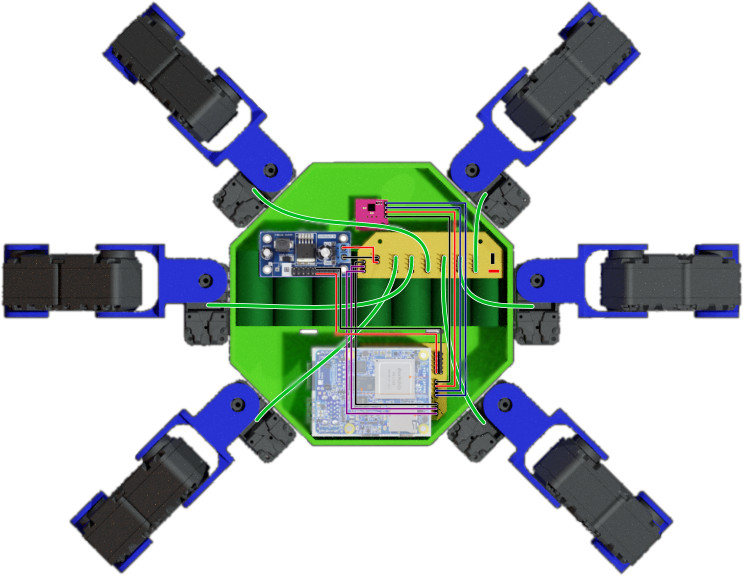
printed_circuit_boards/nanopi_shieldis a shield that connects on NanoPi Neo4 expansion header and provides headers for UART, I2C and 5v power.printed_circuit_boards/power_boardis a power distribution board and connects all servomotors to one UART bus.
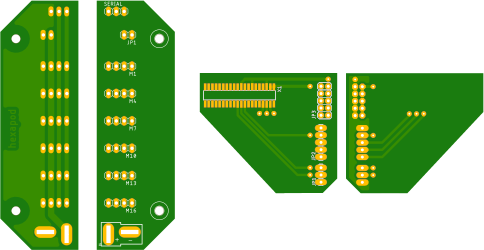
Only one serial port
These PCB connect all servomotors serial ports together. This may bottleneck your communication speed later, so if your board have more serial ports you may remix those files.
Battery
Battery requirements
Herkulex DRS-0101 requires a DC voltage from 7 to 12 V, and draws approximately 500 mA (at 7 V) at maximum torque. So the battery needs to be able to deliver at least 9 A peak current at a DC voltage from 7 to 12 V.
We choose 7 SubC NiMH cells at 3000 mAh each in series but you may go with a Lithium battery that will have a better capacity over mass, thus being more dangerous. With the NiMH cells, we measured around 2 hours of autonomy using the robot.
Battery protection and connection
For the battery, you should use a fuse and a switch in series and then connect onto the large battery connector of the power board.
Powering the embedded computer
The embedded computer requires a 5 V DC voltage and can draw up to 3 A peak current. We choose Texas Instrument LM2596 Buck regulator as breakout boards exist and are simple to use.
How to wire it up