Table of content:
Introduction to reinforcement learning
Reinforcement learning (RL) consists in using machine learning techniques to make decisions and control robots. The domain studies how an agent can learn how to achieve goals in an environment.
At every step of the environment (each 50ms for our robot), the agent sees an observation of this environment and send an action to take depending on his policy.
When learning, the environment also returns a reward at every step to indicate how bad the agent did act. The sum of all these rewards when the episode ends is the return of this episode.
OpenAI Gym environments
The OpenAI Gym library defines an interface to reinforcement learning environments, making them easier to share and use. Gym also provides a large collection of environments to benchmark different learning algorithms [Brockman et al., 2016].
A Gym environment is a Python class implementing a set of methods:
import gym
class ExampleEnv(gym.Env):
def __init__(self, param1=0.01, param2=False, param3=200):
super().__init__()
# Initialize the environment
def reset(self):
# Reset the environment
return observation
def step(self, action):
# Do an action
return observation, reward, done, {}
def render(self, mode='human'):
# Render the environment for human visualization or for recording
def close(self):
# Close environment
def seed(self, seed=None):
# Change the random number generator seed
OpenAI Gym Reacher-v2
OpenAI Gym includes an environment of an robot arm in a 2D space which goal is to reach a target. It uses MuJoCo which is a proprietary equivalent of BulletPhysics.
It is a great base to start with as one of our goals is to make one robot leg reach a target.
Reinforcement learning tasks associated with kraby
The gym_kraby Python package includes four OpenAI Gym environments:
-
gym_kraby:HexapodBulletEnv-v0: simulate full robot with BulletPhysics, -
gym_kraby:HexapodRealEnv-v0: command the full real robot, -
gym_kraby:OneLegBulletEnv-v0: simulate only one leg of the robot with BulletPhysics, -
gym_kraby:OneLegRealEnv-v0: command only one leg of the robot.
You may install and test those environments by running in a Python environment:
pip install gym-kraby
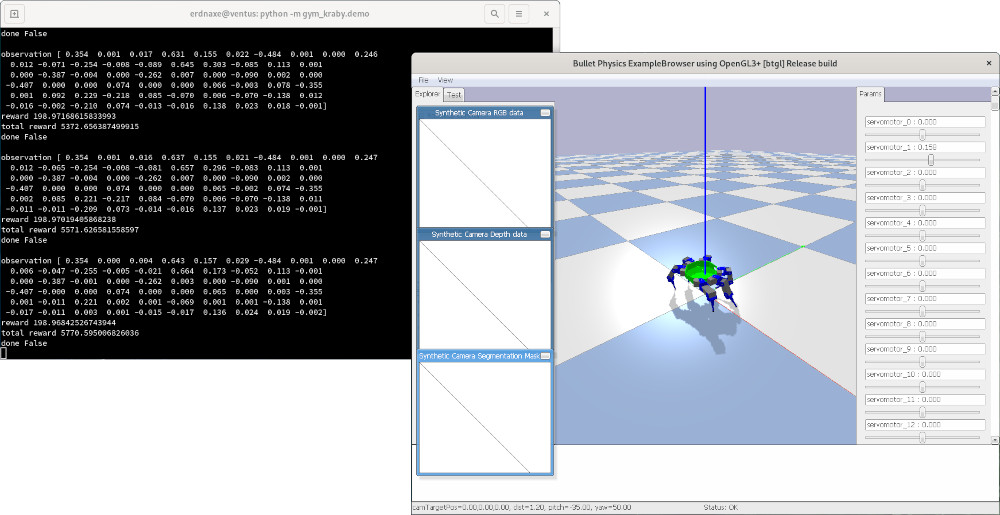
python -m gym_kraby.demo --help
The package includes a demo script to test each environment.
Not tested
gym_kraby:HexapodBulletEnv-v0 and gym_kraby:HexapodRealEnv-v0 are quite similar to the “OneLeg” variant but they were not tested in learning.
Using Kraby Gym environments
You may use these environments as any other OpenAI Gym environment.
You could also invoke the environment with render=True to show
PyBullet GUI.
import gym
env = gym.make('gym_kraby:HexapodBulletEnv-v0', render=True)
observation = env.reset()
score_return = 0
done = False
while not done:
a = env.action_space.sample() # take a random action
observation, reward, done, _ = env.step(a) # step
score_return += reward
print("Environment episode is done, your total return was", score_return)
env.close()
As environments with only one leg cannot end prematuraly (and done will always returned true),
you may use a time limit wrapper:
from gym.wrappers import TimeLimit
env_no_time_limit = gym.make('gym_kraby:HexapodBulletEnv-v0', render=True)
env = TimeLimit(env_no_time_limit, max_steps)