Table of content:
Build the structure
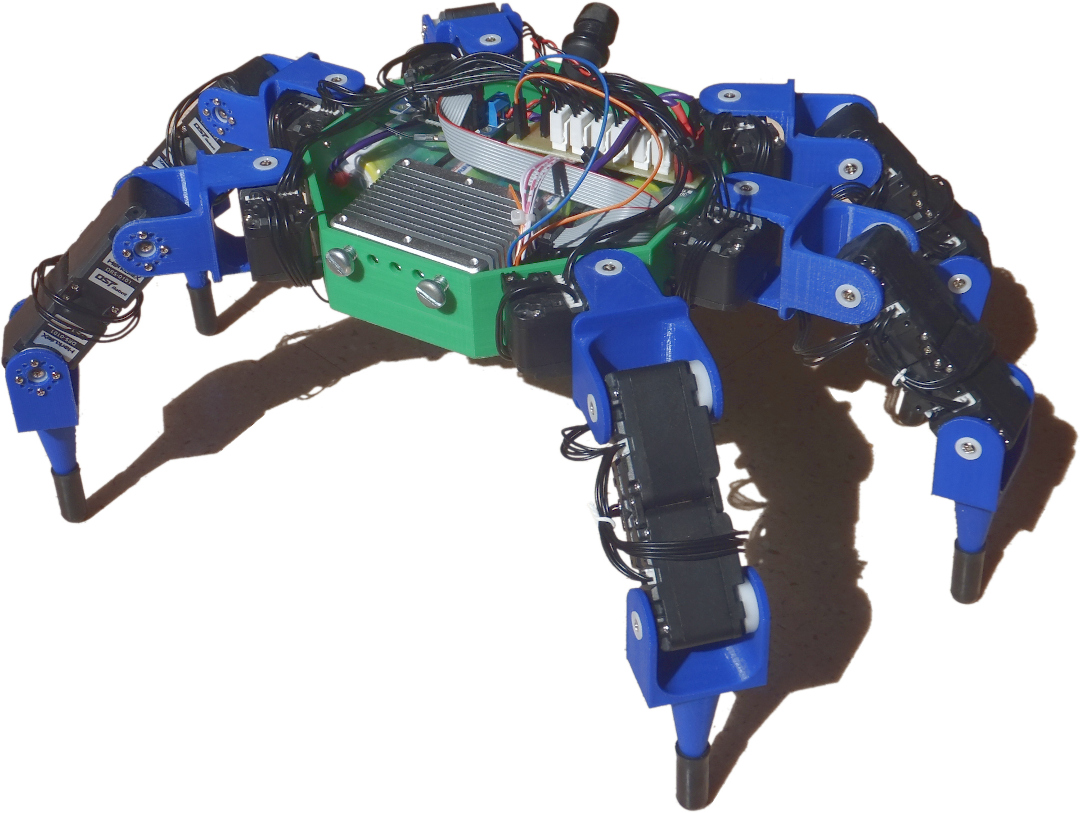
This section focuses on building the base structure of the robot.
3d-printed parts
This robot uses 3d-printed parts to be easily remixed. Blender source files and STL are available at https://github.com/erdnaxe/kraby/tree/master/3d_parts or on Thingiverse.
This chassis also reuses the parts that come with Herkulex servomotors.
To build the robot, you will need to print:
-
6x
joint.stl: top part of one leg, -
6x
foot.stl: bottom part of one leg, may be modified to adapt to different rubber endcap or touch sensor, -
1x
box.stl: main body of the robot, may be modified to adapt to different electronics.
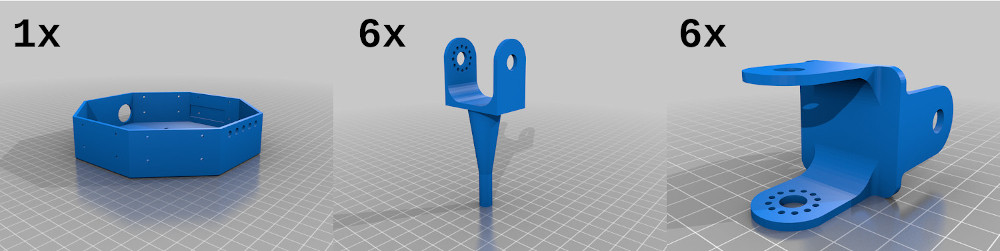
If you are 3d-printing with a 0.2 layer height on a standard Cura profile, it should take around 22h30 of printing, and one quarter of a one-kilogram spool of plastic.
Non-printed parts
-
7x SubC NiMH 3000mAh, mine are from Conrad
-
6x Rubber endcap 0.313” x 1.25”, like Lynxmotion REC-02
-
optional 1x NanoPi Neo4 or a serial interface
-
optional 1x LM2596 - 5V 3A regulator board (to power NanoPi for example)